|
發布時間: 2018-11-8 13:32
正文摘要:伺服系統選擇電機時,都說電機要滿足慣量匹配的要求,慣量比大約3~20之間,但一直不確切的了解為什么。 網絡及各種論壇中的解釋多是類似于慣量不匹配就類似于“小馬拉大車”、“小球與很重的物體碰撞”,這些比 ... |
|
。 |
| 666 |
siaoma3160 發表于 2018-11-13 15:55 調低系統增益,確實是會讓動態特性變軟,具體現象就是響應曲線的斜率變小,穩定時間變長。 但,是否在通電狀態下,就可以輕易用手撥動,我沒有做過測試,不敢輕易下定論 即使假定上面的說法是正確的,你提的疑問,我認為也是不相違背的 回答這個疑問,我覺得有必要說以一下PID,所謂的調低系統增益,就是調低P,也就是調低放大倍數,在產生同樣偏差的情況下,用較小的輸出去校正這個偏差,如果這個輸出扭矩小到比手指產生的扭矩還要小,就可以用手撥動,但,我想也僅限于小范圍的擺動,如果可以整圈的轉,那只有一個可能,就是電機壞了。 轉矩特性曲線是指的伺服系統的最大能力,如果是S1曲線,上面的某一個點表示相應轉速下能長期輸出的扭矩最大值,在產生偏差很大的時候,偏差再乘一個增益,就會更大,因此電機仍然可以按照自己的最大能力來輸出 以上,是我的看法。 |
塵世天涯 發表于 2018-11-12 18:02 再繼續請教下,我從一些帖子(http://www.odgf.cn/thread-477980-1-1.html)了解到:對于伺服電機驅動的設備,慣量比大導致系統產生振蕩不穩定時,可以通過調低系統增益來改善,但這樣會使系統的動態特性比較軟,也就是鎖機能力差,是不是可以理解為降低增益后,人為轉動設備(設備為回轉型)終端會變得相對容易。根據這個理解,是不是可以說伺服電機的保持轉矩(上電后控制伺服電機轉動一定角度后,停留在一定位置保持的能力)就與控制系統增益有關系了? 增益大,保持轉矩大,增益小,保持轉矩小?假如增益很小的話,是不是保持轉矩就幾乎沒有了? 上面的結論又與伺服電機的轉矩特性曲線相違背,因為根據伺服特性曲線理解的話,保持轉矩應該就是伺服電機轉速為零時的轉矩,這個時候轉矩是一個定值,跟控制系統增益應該沒有關系? 上述疑惑應該怎么解釋?麻煩大俠幫忙解答下 |
fangyunsheng 發表于 2018-11-13 07:41 從定性角度來說,伺服系統有兩個指標,一個是動態性,一個是穩定性 動態性用來描述伺服系統對控制信號的跟隨能力,量化的指標用帶寬來衡量。慣量比越大,動態性越差。表現出來就是加減速能力比較低 穩定性是描述伺服系統抵抗外部擾動的能力,這個沒有量化的指標。慣量比越大,穩定性越大,當慣量比超出限制,就會自激。 所以,加減速能力,只是果,慣量比才是因。 |
塵世天涯 發表于 2018-11-12 18:02 受教了!再次感謝! |
塵世天涯 發表于 2018-11-12 18:05 如果扭矩不夠,根本不能帶動負載正常運動呢? 慣量不匹配,倒是可以通過改變升降速時間來改善吧 |
fangyunsheng 發表于 2018-11-12 15:28 扭矩不夠,如果應用場景降低要求,比如把加速度降下來,仍然可以用的,只是不能完全滿足要求。因此是好不好用的問題 慣量比不對,電機上電就會出問題,參考樓上的解釋。在不改變硬件(電機,減速機,傳動鏈,負載)的情況下,這個問題無解。因此是能不能用的問題 |
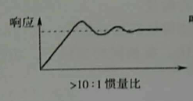
siaoma3160 發表于 2018-11-12 15:09 彈性碰撞理論,我認為跟我前面提到的理論并不矛盾。 理想情況下,負載的動量和電機轉子的動量可以理解為完全彈性碰撞,動量在瞬間轉移,而驅動器的作用就是把電機轉子在瞬間獲取的速度在盡可能短的時間抵消掉,并且重新轉化為正值,再次與負載進行“碰撞”,可以理解為,負載前進的過程,就是無數次彈性碰撞的過程。到達位置之后減速的過程剛好相反。驅動器可以依靠調整施加給轉子的單次的能量和頻率來間接的調整負載的速度和位置。 實際的情況,系統不可能完全是剛性,任何傳動系統都有間隙,即使是實心的零件,仍然會有彈性變形,這就相當于在轉子和彈簧之間增加了一個彈簧,導致轉子在調整的時候存在很大的滯后性,因此一定會有超調,只是調整的時間長短而已。 當轉子慣量相當于負載慣量較小的時候,超調量就會額外增加,這個也很好理解,慣量比是1的時候,理想情況只要一次碰撞,負載就可以停住,慣量比是10的時候,同樣條件要碰撞10次,負載才能停住。額外增加的調整時間就會影響系統的動態性能,因為需要的調整時間變長了,在要求的時間內走不到位。 當轉子慣量遠小于負載慣量的時候,就會發生嘯叫,自激擺動。電機上電以后,首先就是自己定位,如果放在顯微鏡下面看,即使是不轉的情況下,電機軸也是在做高頻率擺動的。慣量比大到超過系統允許值的時候,就會發生“跑過”。電機不轉時候可以理解為允許的調整時間為無限長,因此電機一定可以到達位置,但是到位以后停不下來,會沖過去,之后掉頭,再次沖過,二次掉頭,二次沖過,如此反復。本來只是微小的擺動,變得頻率越來越高(嘯叫),幅度越來越大(自激擺動) |
小黑屋|手機版|Archiver|機械社區 ( 京ICP備10217105號-1,京ICP證050210號,浙公網安備33038202004372號 )
GMT+8, 2025-5-4 19:05 , Processed in 0.057376 second(s), 16 queries , Gzip On.
Powered by Discuz! X3.4 Licensed
© 2001-2017 Comsenz Inc.
 收藏
收藏 問題專業,描述清楚
問題專業,描述清楚 伸手黨/灌水/看不懂
伸手黨/灌水/看不懂