|
發布時間: 2024-12-12 14:01
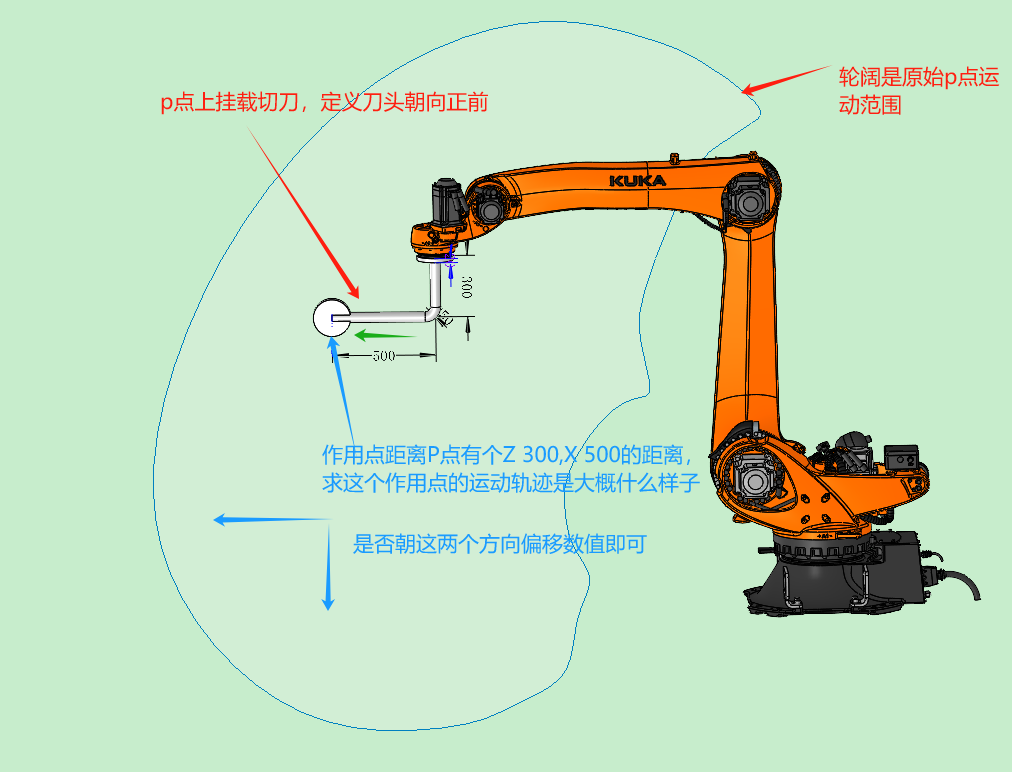
正文摘要:各位大佬: 有個機器人的掛載末端治具后的的活動范圍,有點迷茫,同事有的說的范圍不變,和之前p點范圍一樣,但總覺得不對啊,掛載都延長了,相 ... |
| 可以3D模擬一下 |
| 把夾具等給供應商,讓他給你3D模擬一下 |
| 應該通過重新設定末端工具坐標系,設定末端工具坐標軌跡而不是機器人本身的位置軌跡。 |
cspcm8 發表于 2024-12-12 16:17 最后什么結果 |
|
只沿XY偏移你是把末端旋轉軸固定不轉來看了,肯定不對啊,實際治具在末端還可以旋轉的。所以實際的軌跡應該是在原P點軌跡上每個位置把你的治具做360度旋轉,末端形成的軌跡才是新的軌跡范圍 |
| 這樣受力不好 |
|
要是能實現批量生產就好了。 |
|
您好,先生借貼咨詢一下 現在就是想設計一臺材料測試設備需要高頻大力且位置可控可點動能在高溫環境下工作,對精度有要求,用400W的伺服電機外加絲桿模組可以實現嗎。行程50mm高溫的一個殼體電機外置,要求力度夠大在300N,或100N以上,50mm,2~3hz,5mm,10~20hz做往復運動,但考慮絲桿以及電機壽命換成帶會好一些嗎 |
小黑屋|手機版|Archiver|機械社區 ( 京ICP備10217105號-1,京ICP證050210號,浙公網安備33038202004372號 )
GMT+8, 2025-5-5 22:40 , Processed in 0.087668 second(s), 18 queries , Gzip On.
Powered by Discuz! X3.4 Licensed
© 2001-2017 Comsenz Inc.
 收藏
收藏 問題專業,描述清楚
問題專業,描述清楚 伸手黨/灌水/看不懂
伸手黨/灌水/看不懂